
‘Sở thú’ robot lấy cảm hứng từ động vật
Khoa học - công nghệ - Ngày đăng : 09:22, 07/05/2023
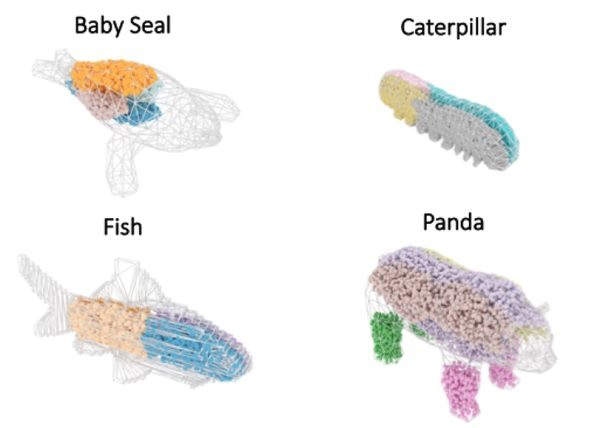
Nền tảng mở SoftZoo cung cấp nguyên mẫu 3D thực hiện các nhiệm vụ cụ thể trong môi trường khác nhau. Theo trưởng nhóm Tsun-Hsuan Wang: “Nền tảng của chúng tôi có thể giúp người dùng tìm ra hình dáng robot tối ưu nhất, cho phép họ thiết kế nên các thuật toán robot mềm dẻo làm được nhiều việc. Về cơ bản thì SoftZoo giúp chúng ta hiểu cách thức tốt nhất để robot tương tác với môi trường của chúng”.
SoftZoo tiến xa hơn một số nền tảng tương tự trước đó khi mô phỏng hàng loạt môi trường như vùng tuyết, vùng nước, sa mạc hay đất ngập nước. Thay vì chỉ cung cấp mô hình chẳng hạn như hải cẩu hay sâu bướm di chuyển theo hướng nhất định, nền tảng đặt các thiết kế robot này trong môi trường khác nhau thể hiện rõ chúng hoạt động như thế nào.
Robot truyền thống thường gặp khó khăn khi hoạt động ở môi trường tự nhiên ngoài thực tế. Trong khi đó, robot mềm dẻo lấy cảm hứng từ động vật với tính linh hoạt và tính thích ứng cao đã chứng minh được chúng phù hợp với tình huống khó khăn như tìm kiếm cứu nạn trong công trình sập hay dòng nước chảy xiết.
Nhà khoa học MIT Daniela Rus cho biết: “Cách tiếp cận đồng thiết kế phần thân lẫn phần não robot (thông qua SoftZoo) mở ra cơ hội tạo nên các cỗ máy tùy chỉnh nhanh chóng cho nhiệm vụ cụ thể”.
Từ mô phỏng đến ra đời sản phẩm thực vẫn còn chặng đường dài. Trưởng nhóm Wang lưu ý: “Mô hình cơ, độ cứng thay đổi theo không gian và triển khai cảm biến trong SoftZoo chưa thể được thực hiện một cách đơn giản bằng các kỹ thuật chế tạo hiện tại. Chúng tôi vẫn đang nghiên cứu tìm cách vượt qua thách thức này”.